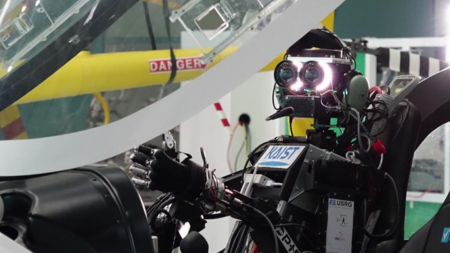
카이스트 기계공학과 휴머노이드로봇연구센터 박해원 교수 연구팀이 차세대 휴머노이드 로봇의 하체 플랫폼을 독자적으로 개발했습니다.
연구팀은 가상환경에서 자체 개발한 강화학습 알고리즘을 통해 인공지능 제어기를 훈련하고 시뮬레이션과 현실 간 격차를 극복해 실제 환경에 성공적으로 적용했다고 밝혔습니다.
이번에 개발된 하체 플랫폼은 모터와 감속기, 모터 드라이버 등 핵심 부품을 연구팀이 직접 설계·제작했다고 설명했습니다.
연구팀은 핵심 부품부터 인공지능 제어기까지 자체 기술로 확보해 휴머노이드 연구의 하드웨어와 소프트웨어 양 측면에서 독립성을 달성한 데 의미가 있다고 덧붙였습니다.
YTN 사이언스 임늘솔 (sonamu@ytn.co.kr)
[저작권자(c) YTN science 무단전재, 재배포 및 AI 데이터 활용 금지]








![[TODAY인] 의료 데이터로 살린 골든타임…100만 명 바이오빅데이터 구축](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606111604589515_h.jpg)
![[과학1열] 젠슨 황 4박5일 광폭 행보…방한 뒤 남은 과제는?](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606101602052373_h.jpg)
![[TODAY인] 안전한 원자력 관리·규제…원안위 성과와 목표는?](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606091559572221_h.jpg)
![[사이다] ① 안전성·성능 동시에 잡은 수계 아연이온전지](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606051602238525_h.jpg)
![[과학1열] AI로 신약 후보 물질 설계…'드 노보 단백질' 기대와 우려는?](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606041605325673_h.jpg)
![[TODAY인] "작지만 강하다"…강소기업의 미래와 비전은?](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202606011602111693_h.jpg)
![[사이다] ② 패혈증 원인균 빠르게 잡는 AI 기술 개발](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202605291603127083_h.jpg)
![[사이다] ① 암 세포 영양 공급 차단하고 제거하는 항암 시스템 개발](https://imgscience.ytn.co.kr/sciencetv/jpg/vod0082/2026/202605291602115151_h.jpg)