'로봇 협력 교란' 공격 방어하는 AI 기술 개발
2025년 08월 04일 오전 09:00
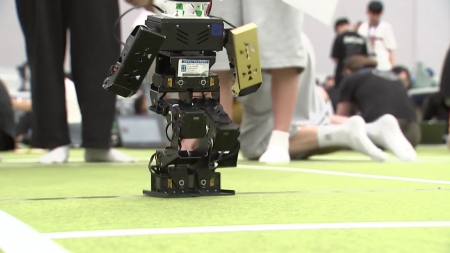
국내 연구팀이 다중 로봇 협력 체계의 취약점을 극복할 수 있는 강화학습 기반 기술을 개발했습니다.
UNIST 인공지능대학원 한승열 교수팀은 다중 에이전트를 순차적으로 교란해 협력 구조를 붕괴시키는 시나리오를 고안하고, 이에 대응하는 방어 학습 프레임 워크를 설계했습니다.
이 기술은 공격 상황에 대한 반복 학습을 통해, 센서 오류나 통신 지연 등 현실적인 교란 조건에서도 에이전트들이 안정적인 협력을 유지하도록 만듭니다.
실험 결과, 이 기술로 학습한 AI는 기존 방식보다 높은 적응력과 협력 안정성을 보였고, 자율 드론과 군집 로봇 등 다양한 분야에 적용될 가능성이 높은 것으로 평가됐습니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
UNIST 인공지능대학원 한승열 교수팀은 다중 에이전트를 순차적으로 교란해 협력 구조를 붕괴시키는 시나리오를 고안하고, 이에 대응하는 방어 학습 프레임 워크를 설계했습니다.
이 기술은 공격 상황에 대한 반복 학습을 통해, 센서 오류나 통신 지연 등 현실적인 교란 조건에서도 에이전트들이 안정적인 협력을 유지하도록 만듭니다.
실험 결과, 이 기술로 학습한 AI는 기존 방식보다 높은 적응력과 협력 안정성을 보였고, 자율 드론과 군집 로봇 등 다양한 분야에 적용될 가능성이 높은 것으로 평가됐습니다.
YTN 사이언스 권석화 (stoneflower@ytn.co.kr)
[저작권자(c) YTN science 무단전재, 재배포 및 AI 데이터 활용 금지]